기타 업적
튜링상을 수상한 후에도 민스키의 연구는 정력적으로 계속되었다. 그리고 그의 연구는 인공 지능에만 한정되지 않았다. 여기서는 튜링상 수상과 직접적인 관련은 없지만 컴퓨터 과학 분야에 큰 영향을 주었던 활동을 몇 가지 살펴보고자 한다.
퍼셉트론
마빈 민스키와 시모어 페퍼트가 함께 쓴 <퍼셉트론>6은 인공지능 연구 역사에서 가장 큰 논쟁거리 중 하나였다. 신경망 모델에 빠져 인공지능의 세계로 들어왔던 마빈 민스키는 로젠블랫의 퍼셉트론 모델을 수학적으로 모델링하면서 그 한계를 지적했다.
1958년에 로젠블랫이 발표했던 퍼셉트론은 1951년에 민스키가 만들었던 SNARC와 유사한 개념을 가지고 있다. 신경망의 논리 동작에 사용되는 인자값을 반복적인 학습을 통해 보정해나가는 방식이다. SNARC에서는 각 뉴런에서 입력 단자의 신호를 출력 단자로 전달할 때 0에서 1 사이에 있는 확률값을 적용하는데 반복적인 학습을 통해 이 값은 보정된다. 퍼셉트론에서는 뉴런의 입력 신호(입력값)마다 적용되는 가중치weight들이 학습을 통해 결정된다.
만약 W * X + b > 0 이면 f(X) = 1
그렇지 않으면 f(X) = 0
(여기서 X는 입력값의 벡터이다. 예를 들어 입력이 2개이면 X = [x1, x2]가 된다.
그리고 W는 각 입력값에 가해지는 가중치 벡터이다. 입력이 2개이면 W = [w1, w2]가 된다.)학습 데이터를 하나씩 적용할 때마다 W 값은 보정되는데 여기서 문제는 모든 학습 데이터를 적용하고 나면 과연 W 값이 특정 값으로 수렴하는가이다. 학습 데이터를 적용할 때마다 W 값이 널뛰듯이 바뀐다면 학습이 완료된 후에 얻는 W 값을 사용할 수가 없다. 민스키와 페퍼트는 W 가 특정 값으로 수렴하기 위해 학습 데이터가 가져야 할 조건을 찾았는데, 학습에 사용되는 입력 데이터들을 좌표평면 위에 놓았을 때 결과값을 1로 가지는 학습 데이터와 결과값을 0으로 가지는 학습 데이터가 하나의 직선으로 양분될 수 있어야 한다는 것이었다.
예를 들어 논리곱(AND) 연산을 퍼셉트론에 학습시킬 수 있는지를 생각해보자. 2개의 입력을 가지는 논리곱은 다음과 같은 표로 정의된다.
입력(x1) 입력(x2) 결과값
0 0 0
0 1 0
1 0 0
1 1 1이제 위의 입력 데이터를 x1, x2 두 개의 좌표 축을 가지는 평면에 놓아보자. 해당 좌표에 놓을 때 점 대신 결과값을 표시하면 다음과 같다.
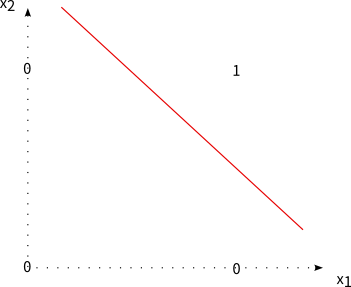
세 개의 0값 좌표와 1개의 1값 좌표를 구분 짓는 직선(그림에서 빨간색 선)을 그을 수 있으므로 논리곱은 퍼셉트론으로 구현이 가능하다.
그런데 모든 논리 연산이 퍼셉트론으로 구현 가능할까? XOR 연산을 퍼셉트론으로 구현할 수 있는지 따져보자. 2개의 입력을 가지는 XOR 연산은 아래와 같은 표로 정의된다.
입력(x1) 입력(x2) 결과값
0 0 0
0 1 1
1 0 1
1 1 0이 네 개의 데이터를 좌표 평면에 놓아보면 다음과 같다.
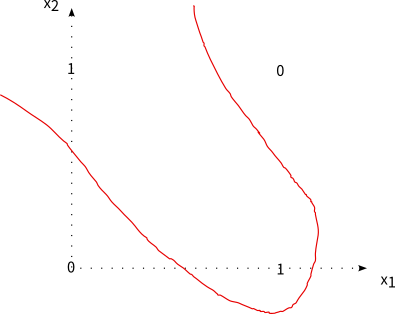
2개의 0값 좌표와 2개의 1값 좌표를 구분지을 수 있는 직선은 불가능하다. 그림에서처럼 기괴한 곡선을 그려야만 가능하다. 따라서 XOR 연산에 사용할 수 있는 퍼셉트론 뉴런은 만들 수 없다는 의미이다. 민스키와 페퍼트는 퍼셉트론 모델에 대해 비관적인 입장을 보였고 이는 큰 파장을 불러오면서 신경망 모델 무용론이 확산되는 계기가 되었다.
하지만 일부 연구자들이 꾸준히 신경망 모델을 발전시키면서 다층으로 구성된 퍼셉트론 모델은 XOR을 구현해낼 수 있음을 보였다. 1987년에 퍼셉트론 개정판이 나오면서 민스키는 이 부분을 바로 잡았다.
흥미로운 점은 민스키와 로젠블랫이 가까운 사이였다는 것이다. 민스키는 브롱크스 과학 고등학교에서 로젠블랫의 1년 후배였다. 신경망 모델을 놓고 두 사람은 각각 비관론자와 낙관론자를 대변하며 학회에서 자주 논쟁을 벌였지만 사적으로는 가깝게 지냈다고 한다. 로젠블랫이 불의의 사고로 일찍 세상을 떠나지 않았다면 신경망 모델이 좀 더 일찍 두각을 내었을지도 모르겠다.
그렇다면 신경망 모델의 대안은 무엇일까? 그것은 흔히 기호주의 인공지능Symbolic AI이라고 부르는 것이다. 인간이 이해할 수 있는 기호를 사용하여 지능을 표현하고 구현하자는 것이다. 이 방식은 1960년대부터 1990년대까지 주류로 자리 잡았는데 민스키는 상식적인 지식Commonsense knowledge이라는 방법론을 강조했다. 사람이 어떤 상황에 반응할 때는 한 가지 과정process만 작용하는 것이 아니라 다양한 여러 과정들이 동시에 복합적으로 작용한다고 보았고, 그래서 어떤 입력에 대해 출력을 정의할 때 하나의 수학적 논리만으로 결정될 수 없다고 주장했다. 복합적으로 작용하는 다양한 과정들 각각은 그 과정의 특성에 맞게ad hoc 다루어져야 했다.
보통 사람이 일상생활에서 하는 일들은 20개 정도의 서로 다른 행위와 그들 사이의 관계로 구성됩니다… 예를 들어 내가 강아지를 바라볼 때 나는 그것이 물리적 객체임을 인식하면서 동시에 나의 머릿속에서는 그 개의 털이 무슨 색이고 몸무게가 어느 정도 나갈 것이고 하는 등등의 인식을 처리하고 있습니다.11
기호주의 인공지능의 또 다른 지지자였던 존 매카시는 수학 공식과 같은 논리를 기본으로 하고 싶어 했던 반면에 민스키는 다양한 방법론을 혼용하여 사용하는 방법을 지향했다. 매카시의 방법론을 사용하면 너무 많은 예외 상황을 처리하는 어려움을 겪게 된다고 민스키는 지적했다.11

답글 남기기