기타 업적
아이번 서덜랜드의 삶은 참으로 다채로웠다. 그는 학교와 현장을 넘나들면서 꾸준히 의미 있는 결과물을 내놓았다. 그가 거쳐 간 학교들을 열거해 보자면, 카네기 멜런 대학교, 캘리포니아 공과대학, MIT, 하버드 대학교, 유타 대학교, 캘리포니아 대학교 버클리, 포틀랜드 대학교 등이 있다.
헤드 마운트 디스플레이
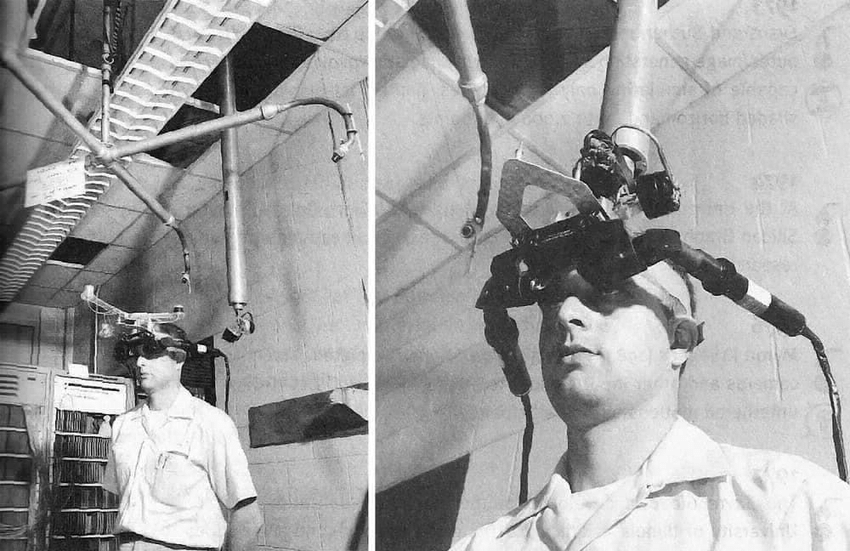
흔히 HMD라는 약자로 불리는 헤드 마운트 디스플레이를 최초로 만든 이가 아이번 서덜랜드이다.9 그는 ARPA에서 IPTO 부서장으로 있을 때 이런 디스플레이 장치에 흥미를 갖게 되었다.
내가 DARPA에 있었을 때 벨 헬리콥터Bell Helicopter 사를 방문한 적이 있었습니다. 그 회사는 야간에 헬리콥터가 착륙할 때 조종사를 도와주기 위해 동체 아랫부분에 적외선 카메라를 장착했습니다… 그것을 보고 나는 헤드 마운트 디스플레이를 만들고 싶다는 생각을 했습니다. 그러다가 하버드 대학교의 교수로 자리를 옮기게 되었죠.3
HMD를 위한 화면은 1인치 크기의 음극선관을 사용했다. 이 음극선관은 벨 헬리콥터 사에서 사용하던 것과 동일했다. 서덜랜드는 HMD에서 3차원 화면을 구현하기 위해 노력했다.
하버드 팀이 만든 HMD는 오늘날 VR 혹은 AR 용으로 사용되고 있는 HMD와 유사하지만, 천장에 매달려 있는 형태라는 점에서 차이가 있다.
HMD 연구 자금에 얽힌 재미있는 이야기를 소개하고자 한다. 서덜랜드의 HMD 연구에는 여러 기관이 자금을 지원했는데 그중 한 곳이 CIA였다. 당시 CIA는 나빠진 평판을 개선하려는 노력의 하나로 공개 연구에 자금을 지원하려 했다. 문제는 하버드 대학교 내에서 CIA의 돈을 문제 삼는 목소리가 불거져 나왔다는 것이다. 그래서 전기공학과 교수들이 모여 회의를 가졌다. 찬반양론이 한 치의 양보도 없이 맞서자 학과장이 결론을 내렸다.
“자금의 출처가 더러운 경우는 없습니다. 자금 지원의 조건이 더러울 수 있을 뿐입니다. 하버드 대학교 전체는 항상 이 점을 이해해야만 합니다. 왜냐하면 하버드 대학교가 받아온 기부의 많은 부분은 더러운 무역triangle trade에서 온 것이기 때문입니다.”3
에반스 & 서덜랜드 사
에반스 & 서덜랜드 사가 설립된 해는 1968년이다. 데이비드 에반스와 아이번 서덜랜드는 유타 대학교가 있던 솔트레이크 시에서 이 회사를 시작했다. IBM을 위시하여 스페리 랜드Sperry land, 버로우즈, 컨트롤 데이터 등과 같이 대형 컴퓨터를 제작하는 회사들이 있었지만, 아직 컴퓨터 산업이 일천하던 시절이었다. 그래서 대학에 뿌리를 둔 스타트업 회사의 등장은 새로웠다. 동부의 매사추세츠와 서부의 캘리포니아가 아닌 중부의 유타에서 일찍부터 이런 형태의 회사가 등장했다는 점은 흥미롭다.
초기에 에반스 & 서덜랜드 사의 주력 제품은 그래픽스용 터미널이었다. 달리 말하자면 그림을 보여주는 화면을 의미한다. 지금이야 컴퓨터 화면이 그림을 보여주는 것이 당연하지만 당시만 하더라도 그렇지 않았다. 앞에서 언급한 TX-2 컴퓨터는 아주 특별한 사례였다. 1960년대로 넘어오면서 컴퓨터를 사용하는 방식에 변화가 생겼다. 1950년대만 하더라도 펀치카드를 사용해서 데이터를 입력하고 프린터나 전구를 통해 결과를 확인하는 식이었지만 1960년대에는 터미널이라는 장치를 컴퓨터에 연결해서 사용하기 시작한다. 터미널은 키보드와 음극선관 화면이 붙어 있는 장치인데, 키보드를 치면 그 값이 케이블을 통해 컴퓨터로 전달되고, 컴퓨터가 출력하는 데이터는 다시 케이블을 통해 터미널에 전달되어 음극선관 화면에 나타난다. 하지만 대부분 이 터미널은 문자 정보만을 다룰 수 있어서 화면에 표시되는 정보도 문자뿐이었다.
에반스 & 서덜랜드 사의 첫 제품은 LDS-1이다. 이 이름을 지은 이는 아이번 서덜랜드이다. LDS는 Line Drawing System의 약자이다. 쉽게 생각하자면, LDS-1은 스케치패드에서 라이트펜이 빠진 형태라고 볼 수도 있겠다. LDS-1은 벡터 방식으로 동작했다. 컴퓨터가 LDS-1 터미널에 보내는 정보는 벡터 정보이다. 예를 들어, 직선이라면 시작점과 끝점의 좌표값을 보내는 식이다.
반도체 회로 설계
그가 어렸을 때부터 반도체와 친숙했음은 이미 트랜지스터 일화를 통해 알 수 있다. ARPA에서 일하던 시절에 그는 캘리포니아 공과대학에 있던 카버 미드와 교류한 바가 있었는데 유타 대학교를 그만두고 캘리포니아로 이사한 후에 RAND 연구소에서 다시 조우하게 된다. 그리고 캘리포니아 공과대학의 석좌 교수로 임명되면서 두 사람은 캘리포니아 공과대학을 반도체 회로 설계 연구 중심지로 만들기 위해 함께 노력했다.
아이번 서덜랜드가 지도한 박사 과정 중에 론 에러스Ron Ayres가 있다. 론 에러스는 반도체 설계를 위한 언어에서 선구적인 역할을 했고 아이번 서덜랜드와 함께 회로 설계 데이터의 표준 포맷인 CIF 1.0을 처음 정의했다. 론 에러스에 대해 서덜랜드는 이렇게 회상했다.
론 에러스라는 멋진 학생이 있었습니다. 그는 컴파일러를 짜고 싶어 했습니다. 그래서 내가 이렇게 말했습니다. “집적회로를 위한 컴파일러를 만들어 보는 게 어때?” … 그는 X, Y 좌표를 이해하고 배치 정보를 이해하는 컴파일러를 만들었습니다. 집적 회로 문제에 적절한 컴파일러였습니다.3
로봇
카네기 멜런 대학교에서 그는 다리가 여섯 개 달린 이동 로봇을 개발했다.10 이 로봇은 카누 정도의 크기였고 사람 한 명이 타고 이동하기 위한 용도였다. 사실, 로봇에 대한 관심은 그가 고등학생이던 시절에도 있었다. 당시 그는 형과 함께 에드먼드 버클리의 사무실에 놀러 갔다가, 빛에 반응하는 로봇을 보게 되었다. 그래서 형과 함께 집에서 직접 유사한 로봇을 만들어 보기도 했었다.3
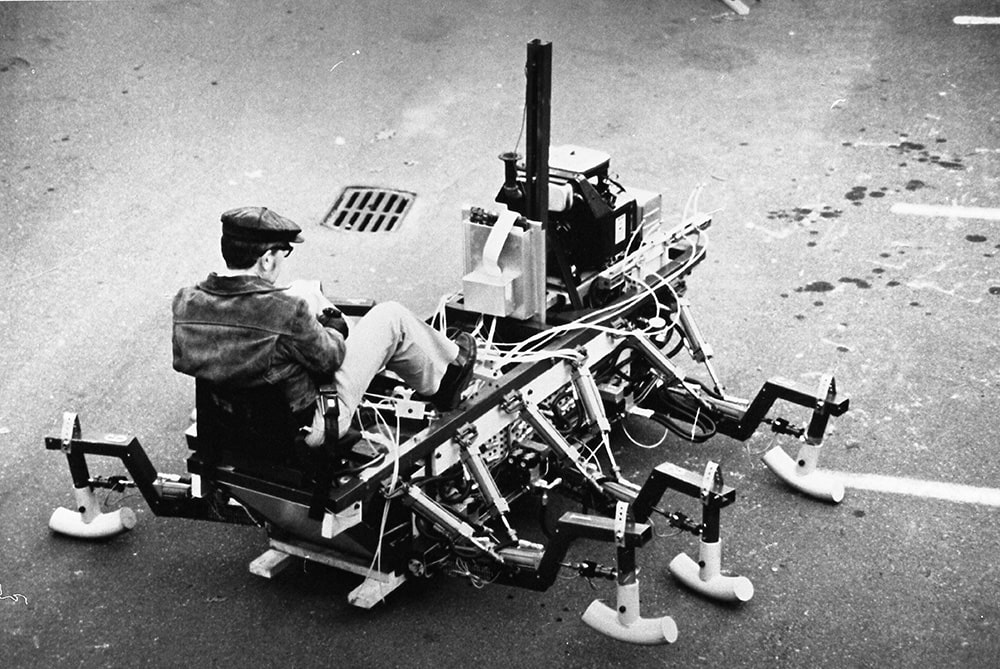
다리가 달린 로봇은 생각보다 쉽지 않았던 것으로 보인다. 후에 다리의 개수를 놓고 그는 다음과 같이 후회했다.
나는 실수를 했습니다. 다리가 여섯 개인 기계는 곤충 정도의 크기여야만 합니다. 말 정도의 크기가 되면 무게가 수백 킬로그램이나 되어서 관성이 너무 커집니다. 그러면 균형 문제가 생길 수밖에 없습니다. 사실 자연을 보면 그걸 알 수 있어요. 다리가 네 개 넘어가는 생물 중에 몸집이 큰 것을 본 적이 없을 겁니다.8
비동기식 회로
그동안 튜링상 수상자들은 선정 이유와 관련된 내용으로 수상 강연을 했다. 예외가 있다면 존 배커스 정도일 텐데 그도 프로그래밍 언어라는 영역을 벗어나지는 않았다. 그런데 아이번 서덜랜드는 선정 이유와는 아무런 상관이 없는 주제로 수상 강연을 했다. 강연 주제는 강연자가 결정할 문제이므로 왈가왈부할 일은 아니지만 조금 황당하기는 하다. 컴퓨터 그래픽스와는 아무런 상관이 없는 비동기식 회로를 강연 주제로 삼은 이유는 다음과 같은 언급에서 유추할 수 있다.
튜링상 선정 위원회에서 전화를 받았는데, “튜링상을 수락하시겠습니까?”라고 묻더군요. 그건 마치 “교황이 가톨릭신자입니까?”라고 묻는 거나 마찬가지죠. 여기에 “아니오”라고 답할 사람이 누가 있겠습니까?
위원회 측에서는, 강연과 함께 논문을 한 편 써야 한다고 알려주었습니다. 그 논문은 심사 없이 학회 논문지에 실린다고 하더군요. 음. 튜링상에서 제일 좋은 부분이 그거였습니다. 아무런 걸림돌 없이 논문을 발표할 수 있다는 거였지요. 하하하.
비동기식asynchronous 회로는 클록clock 신호 없이 동작하는 회로를 말한다. 여기서 클록은 ‘시계’를 의미하는 것이 아니라, 일정 간격으로 발생하는 전기 신호를 의미한다. 일반적인 개인용 컴퓨터에 사용되는 마이크로프로세서들의 명세서를 보면 최대 동작 클록값이 나와 있다. 예를 들어, 인텔의 i7-10700 프로세서는 기본 동작 주파수(클록을 의미한다)가 2.9GHz이다.
동기식 회로는 이 클록 신호가 모든 저장용 단위 회로(또는 부품)에 연결되어 있고 클록 신호가 변할 때 해당 단위 회로의 저장값이 변경된다. 동기식 회로는 클록 신호를 높일수록 성능이 향상된다. 하지만 한없이 높일 수는 없다. 클록 신호의 최대 주파수는 연결된 가장 느린 단위 회로에 의해 결정된다. 예를 들어 다른 모든 단위 회로들은 3.5GHz의 주파수에서 동작하더라도, 최대 동작 주파수가 2.9GHz인 단위 회로가 있다면 결국 전체 회로의 최대 동작 주파수는 2.9GHz를 넘어갈 수 없다.
두 번째 문제는, 클록 신호가 너무 많은 단위 회로에 연결된다는 점이다. 전기 신호의 출력 세기는 한정되어 있다. 그래서 너무 많은 입력에 연결되면 ‘힘이 달리게’ 된다. 이를 보완하려면 처음에는 한 가닥이던 클록 신호를 여러 가닥으로 쪼갠 후 증폭시켜서 사용해야 하는데 이 과정에서 지연시간이 발생하게 되고 결과적으로 최대 동작 주파수에 영향을 준다. 또한, 회로가 차지하는 면적이 커지게 되면 그만큼 클록 신호가 지나가는 거리가 길어지게 되고 지연시간이 증가하는 결과를 가져온다.
서덜랜드는 FIFO를 비동기식 회로로 구현하는 방법을 생각해 냈다. FIFO란 데이터를 저장하는 단위 회로인 레지스터register가 직렬로 연결된 회로를 말한다. 객차가 여러 개 연결된 기차를 연상하면 좋을 듯싶다. 객차의 중간에는 빠져나오는 문이 없다고 하고 객차의 복도는 오직 한 사람만 지나갈 수 있다고 가정해 보자. 그러면 맨 앞의 객차에 있는 문으로 들어간 사람들은 그 순서대로 맨 뒤의 객차 문으로 나오게 된다. ‘먼저 들어간 사람이 먼저 나오는(First In First Out)’ 방식인 셈이다.
만약 객차에는 한 번에 한 사람만 있을 수 있다고 가정한다면, 동기식 회로란 객차와 객차를 이어주는 통로의 문이 모두 동시에 열리는 것을 의미한다. 모든 문이 동시에 열리게 만드는 신호가 클록 신호인 셈이다. 그렇다면 비동기식 회로는 무엇일까? 만약 다음 칸 객차에 아무도 없다면 곧바로 통로의 문을 열어주는 식이다. 모든 문이 동시에 열릴 필요가 없다. 조건만 맞으면 문을 열어 버리면 된다.
서덜랜드는 XOR 논리회로와 뮬러 C 엘리먼트Muller C-element를 사용해서 비동기식 FIFO 회로를 구현했고1, 정상 동작함을 확인했다.
상식적으로 생각해 보면 비동기식 회로가 동기식 회로에 비해서 훨씬 합리적이고 성능을 최대한 끌어올릴 수 있다는 점에서 바람직하다. 하지만 현실에서는 비동기식 회로가 큰 호응을 받지 못했다. 여러 이유가 있을 수 있지만 그중 하나는 테스트가 어렵다는 것이다. 동기식 회로를 테스트할 때는 클록 신호가 기준이 된다. 그래서 신호가 언제 변화할지를 예상할 수 있다. 하지만 비동기식 회로는 각 단위 회로마다 조건만 맞으면 신호가 변할 수 있으므로 신호의 변화 시점을 예측하기가 어렵다.
후학 양성
그가 학교와 기업에서 지도했던 이들은 컴퓨터 그래픽스 분야에서 주도적인 인물로 성장했다. 유타 대학교에서 그가 가르쳤던 인물 중에는 짐 클라크Jim Clark와 헨리 구로Henri Gouraud가 있으며 앨런 케이, 에드윈 캐트멀, 존 워록의 박사 논문을 심사했다.
짐 클라크는 후에 그래픽스용 워크스테이션 개발 업체인 실리콘 그래픽스와 웹 브라우저 개발 업체인 넷스케이프를 창업했다. 헨리 구로는 오늘날 널리 쓰이는 폴리곤polygon 방식의 3차원 모델링을 처음 시도했고 표면에 색을 입히는 셰이딩shading 기법을 제안했다. 앨런 케이는 다이나북Dynabook이라는 개인용 컴퓨터를 제안했고 제록스 팔로알토 연구소에서 스몰토크Smalltalk를 개발했다. 에드윈 캐트멀은 텍스쳐 매핑texture mapping과 안티앨리어싱anti-aliasing 등의 연구에 기여했고 박사 학위를 받은 후에는 루카스 필름을 거쳐 픽사 스튜디오를 창업했다. 존 워록은 졸업 후에 에반스 & 서덜랜드 사에서 근무했고 후에 제록스 팔로알토 연구소를 거쳐서 어도비를 창업했다.
- *출처: https://en.wikipedia.org/wiki/Ivan_Sutherland, CC-BY-SA 3.0
- †그는 Association of Computing Machinery라는 이름을 자신이 지었다고 주장했다. Computer 대신에 Computing Machinery라고 지은 사람이다.
- ‡First In First Out의 약자로, 일련의 데이터가 연속으로 입력될 때 출력도 그 순서대로 이루어지는 저장장치를 가리킨다.
- §현재시점 2023년 4월.
- ¶이 메모리를 프레임버퍼라고 부르기도 한다.
참고문헌
- 1.Sutherland Ivan E. Micropipelines. ACM Turing Award Lectures.:1988. doi:10.1145/1283920.1283946
- 2.Sutherland Ivan Edward. Sketchpad: A Man-Machine Graphical Communication System. Computer Laboratory, University of Cambridge; 2003. doi:10.48456/TR-574
- 3.Oral History of Ivan Sutherland: Part 1 of 2. Computer History Museum; 2017:83.
- 4.Berkeley Edmond. Giant Brains or Machines That Think. Wiley; 1949.
- 5.Sketchpad, by Dr. Ivan Sutherland with comments by Alan Kay. YouTube. Published July 16, 2007. Accessed April 20, 2023. https://www.youtube.com/watch?v=495nCzxM9PI
- 6.Mead Carver, Carver Mead, Conway Lynn. Introduction to VLSI Systems. Addison Wesley Publishing Company; 1980.
- 7.Ivan Sutherland – A.M. Turing Award Laureate. ACM. Accessed April 20, 2023. https://amturing.acm.org/award_winners/sutherland_3467412.cfm
- 8.Oral History of Ivan Sutherland: Part 2 of 2. Computer History Museum; 2017:94.
- 9.Sutherland Ivan E. A head-mounted three dimensional display. Proceedings of the December 9-11, 1968, fall joint computer conference, part I on – AFIPS ’68 (Fall, part I). Published online 1968. doi:10.1145/1476589.1476686
- 10.Sutherland Ivan E, Raibert Marc H. Machines that walk. Scientific American. 1983;248(1):44-53.
(c) 이재범, 2023
이 콘텐츠는 대한민국 저작권법의 보호를 받습니다. 작성된 모든 내용의 권리는 저자에게 있으며, 저자의 동의 없는 사용은 금합니다. 본 콘텐츠의 일부 혹은 전체 내용을 무단으로 전재/복제/배포하거나 2차적 저작물로 재편집하는 경우, 법적 책임을 지게 됩니다.

답글 남기기